Nous rendons le désordre efficace. Dans certains processus de production, il existe des situations dans lesquelles il est plus rentable de charger les pièces non triées dans des boîtes ou des grilles. Dans l’étape de traitement suivante, la complexité consiste maintenant à éliminer ou à contourner le chaos qui en résulte aussi simplement que possible et sans trop de travail.
La technologie de ramassage des bacs utilise la technologie de la caméra 3D sur le robot pour capturer des images des composants désordonnés dans le conteneur et identifier leurs contours. Le robot peut alors saisir la forme identifiée de manière ciblée et amener la pièce dans la bonne position pour le processus suivant.
En tant qu’intégrateur du système de ramassage Keyence (Vous serez redirigé vers un site web externe via ce lien), nous vous garantissons la combinaison parfaite entre hard- et software. Grâce à ses développements innovants, Keyence est lui-même l’un des leaders mondiaux dans les domaines de l’automatisation et des solutions d’assurance qualité.
La particularité du système est que l’image 3D est capturée par un projecteur spécial à haute performance, équipé de quatre caméras séparées. Cela permet d’obtenir des résultats de capture optimaux sans zones mortes – indépendamment de la position et de l’orientation. Pour que le processus se déroule sans problèmes !
Un petit point fort : le système est disponible prêt à fonctionner chez nous. Nous serions ravis de vous montrer les possibilités offertes par vos composants.
N’hésitez pas à nous contacter !
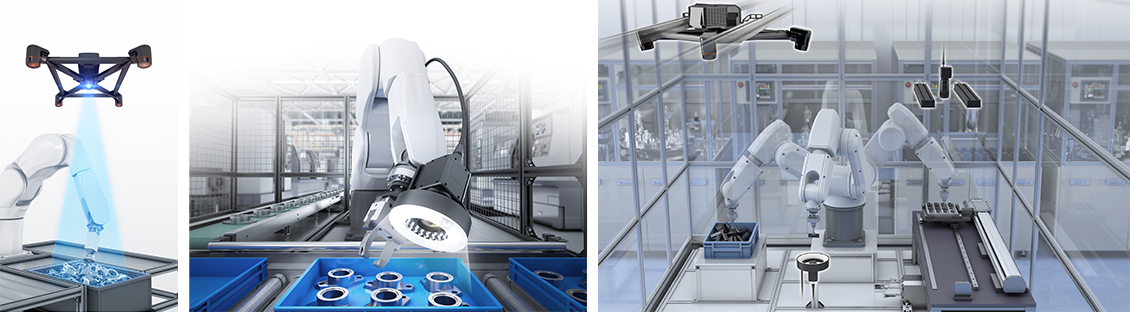
DLa structure typique d’un système de ramassage WMS :
- robot
- pince
- Technologie de caméra 3D pour la reconnaissance des pièces
- Cadre pour le montage de la technologie de la caméra au-dessus de la position vide
- Axe de déplacement – s’il y a plus d’une position vide
- 1 ou 2 cadres à enfoncer pour le positionnement des flans (surveillés par des capteurs) – les flans peuvent être livrés dans des conteneurs ou des boîtes à grille de dimensions allant jusqu’à 1 200 x 800 mm. Hauteur environ 1.000 mm
- Nouvelle station de préhension optionnelle, si les pièces ne peuvent pas être amenées directement à l’étape suivante du processus de la même manière qu’elles ont été prélevées de la boîte
- Station de transfert (bande, station de dépôt, …)
- Programmation / Processus