Wir machen Unordnung effizient. In manchen Fertigungsprozessen kommt es zu Situationen, in welchen es sich als lukrativer erweist, die entsprechenden Teile unsortiert in Kisten oder Gitterboxen zu laden. Im nachfolgenden Bearbeitungsschritt besteht die Komplexität nun darin, dass dadurch entstandene Chaos möglichst unkompliziert und ohne hohen Arbeitsaufwand zu beheben bzw. zu umgehen.
Mit der Bin Picking-Technologie werden, mittels 3D-Kameratechnik am Roboter, Bilder der ungeordneten Bauteile im Behälter erfasst und deren Konturen identifiziert. Anschließend kann der Roboter die erkannte Form zielgerichtet greifen und das Werkstück für den Folgeprozess in die richtige Position bringen.
Als Integrator des Keyence Bin Picking Systems (Sie werden über diesen Link auf eine externe Webseite weitergeleitet) ersprechen wir Ihnen die perfekte Kombination aus Hard- und Software. Keyence selbst gehört mit seinen innovativen Entwicklungen zu den Weltmarktführern in den Bereichen der Automations- und Qualitätssicherungslösungen.
Die Besonderheit des Systems liegt darin, dass das 3D-Bild über einen speziellen Hochleistungsprojektor erfasst wird, welcher mit vier separaten Kameras ausgestattet ist. Dies ermöglicht optimale Erfassungsergebnisse ohne Tot-Zonen – unabhängig von Position und Ausrichtung. Für Ihren reibungslosen Prozessablauf!
Ein kleines Highlight: Das System steht betriebsbereit in unserem Haus zur Verfügung. Gerne demonstrieren wir Ihnen die Möglichkeiten an Ihren Bauteilen.
Kontaktieren Sie uns gerne!
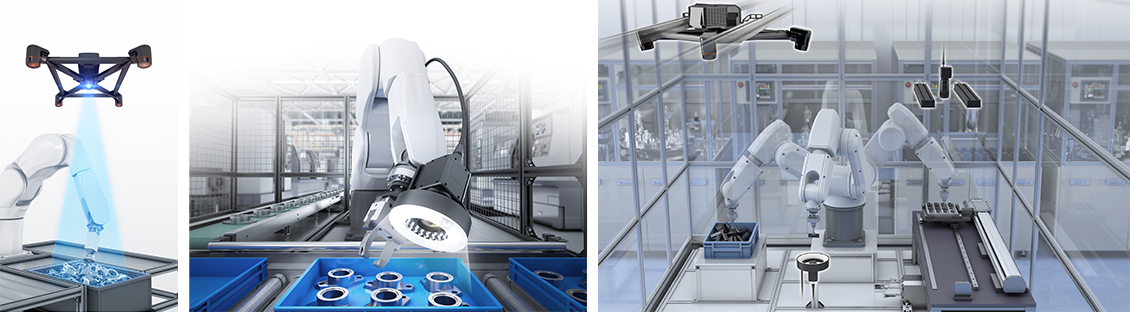
Der Typische Aufbau einer WMS Bin Picking-Anlage:
- Roboter
- Greifer
- 3D – Kameratechnik für Bauteilerkennung
- Gestell zur Montage der Kameratechnik über der Rohteilposition
- Verfahrachse – wenn es mehr als eine Rohteilposition gibt
- 1 bzw. 2 Einfahrrahmen für Rohteilpositionierung (sensorisch überwacht) – Rohteile können in Containern oder Gitterboxen mit Abmessungen bis 1.200 x 800 mm angeliefert werden. Höhe ca. 1.000 mm
- Optional Neugreifstation, falls die Teile nicht direkt so dem nächsten Prozessschritt zugeführt werden können, wie sie aus der Kiste entnommen wurden
- Übergabeplatz (Band, Ablageplatz, …)
- Programmierung / Prozess